Modeling of Electric Vehicle Battery Use for Micro Grid Applications and Estimating the Energy Requirement
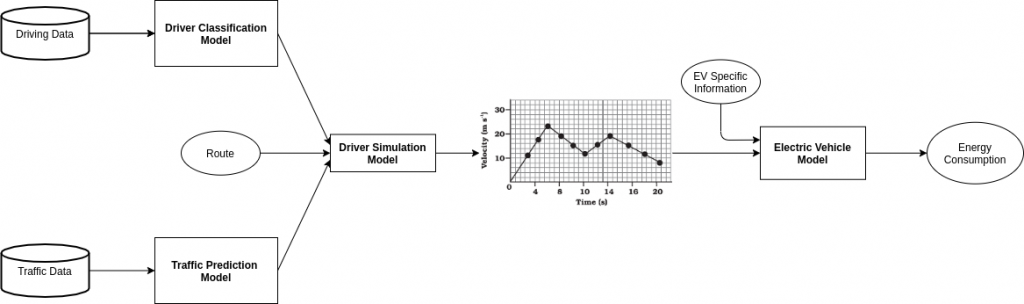
Electric vehicle (EV) charging characteristics can lead to loadings and voltage fluctuations in the distribution system. In microgrid applications, buildings can use parked EV batteries. While the EV owner charges the battery, the building owner saves electricity bills. Besides the economic benefits, control of EV charge levels can be used to reduce the mentioned network problems. As this strategy depends on volunteering, optimal use of the battery is important. In the scope of this project, a system that consists of various models is developed to determine the battery consumption/sharing strategy for EV drivers.
Driver Classification Model
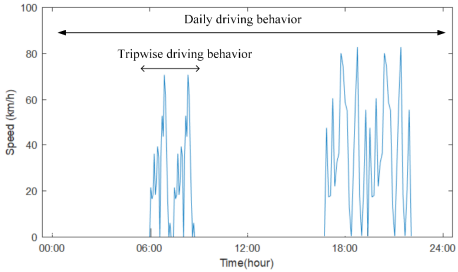
A driving pattern is defined twofold as the patterns in daily usage of the vehicle or the driving behavior patterns in a single trip, as shown in the figure above, where 24 hours driving pattern of an EV is demonstrated. The first definition includes the EV user’s cruising and parking behavior. The latter definition can be recognized as any driving event such as acceleration, deceleration, or stops in a driving cycle and is a significant factor in the relationship between energy consumption and driving style.
The Driver Classification Module involves;
- Classifying the relationship between energy consumption and driving style utilizing the tripwise driving behavior patterns
- Finding stochastic models for trip numbers and durations, connection/disconnection times at charging locations for specific EVs from daily driving behavior patterns.
Traffic Prediction Model
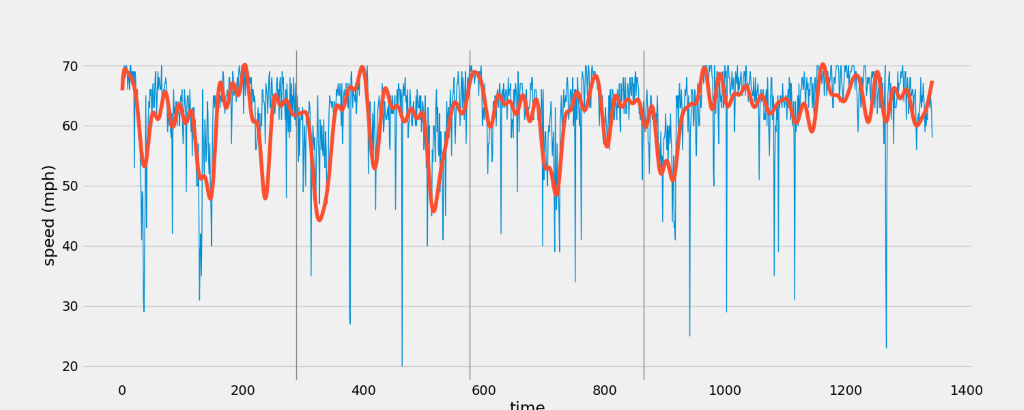
This module performs long and short-term average speed prediction of the road network that approximately consists of 22,000 segments in Ankara, Turkey. For long-term prediction, weekly and daily predictions are obtained with SARIMA and Historical Average models. For the short-term prediction, a Graph Convolutional Model with Gated Recurring Unit is used to capture both spatial and temporal dynamics of traffic [1].
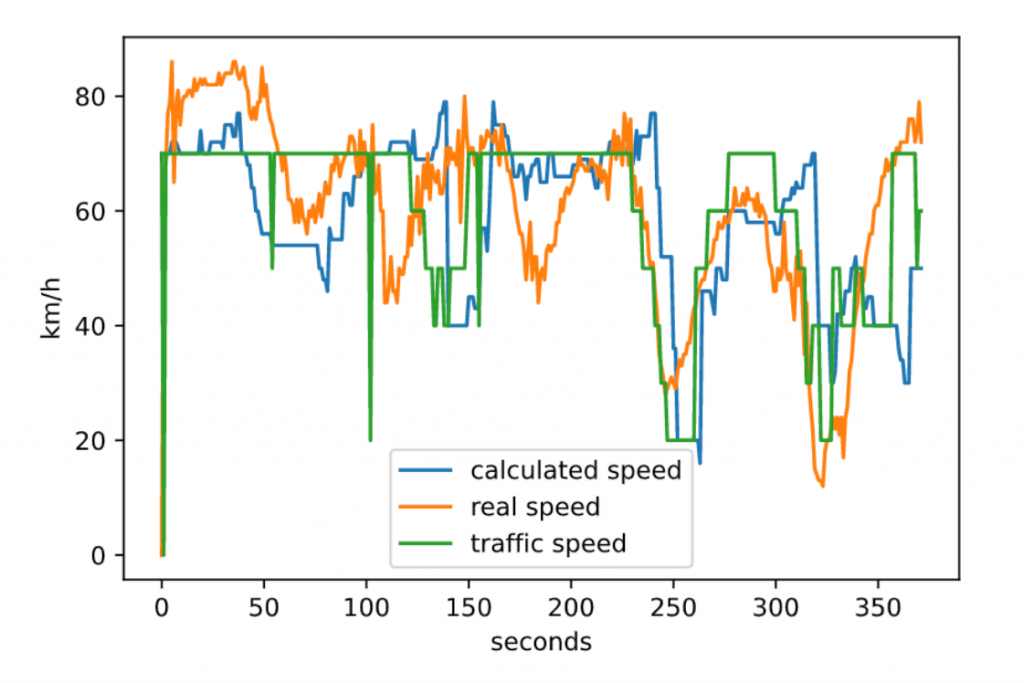
Driver Simulation Model
In this module, Probabilistic Hybrid Automata is used to simulate trips of the drivers of different driver classes identified by the Driver Classification Module. While the states of the automata represent the road traffic, current acceleration & speed of the driver, and the road types; transition probabilities are being fit by the driving data of the corresponding driver classes. The module outputs the speed of the car along its trip.
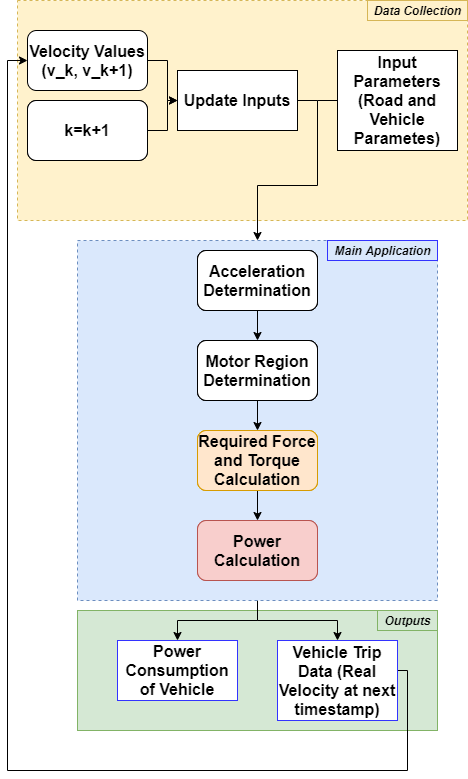
Electric Vehicle Model
The relations between the parameters and the vehicle motion are based on the equations of acting forces. The main goal of drivetrain model is to compare the power consumption of the vehicle with found parameter values and manufacturer data. The drivetrain model takes a drive cycle as an input and calculates the required power at each time step. Power consumption of the vehicle is calculated using the relation between torque and power.
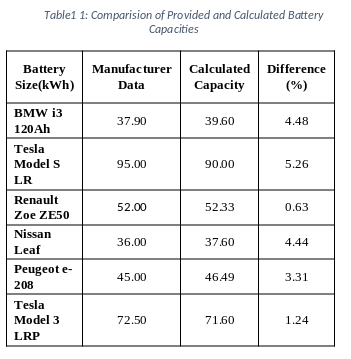
The goal of the state estimation process is to eliminate the errors in measurements and to determine the unbiased values of the states. The state estimation process assumes that the parameters’ values are correct. However, it is not the case in reality because parameter values may change with time. To overcome this situation the real values of parameters should be estimated.
The estimated values are determined by using the estimated parameters and WLTP cycle. Table 1 indicates that the proposed method provides estimates with an acceptable difference with the manufacturer data.
People
Department of Computer Engineering
Asst. Prof. Ebru Aydın Göl
Fatih Acun
Alp Eren Yılmaz
Cenk Gurbet (STAR)
İlker Işık
Mustafa Orhun Köse (STAR)
Department of Electrical – Electronics Engineering
Assoc. Prof. Murat Göl
Asst. Prof. Emine Bostancı
İven Güzel
Soheil Pouraltafi
Berkay Sağlam
Ahmet Fatih Eser
Özgür Arda Küçükaslan (STAR)
Zeynep Çöklü (STAR)
Department of Civil Engineering
Prof. Hediye Tüydeş Yaman
Publications
Fatih Acun, Ebru Aydin Gol. Traffic Prediction on Large Scale Traffic Networks Using ARIMA and K-Means. SIU’2021.
References
[1] L. Zhao, Y. Song, C. Zhang, Y. Liu, P. Wang, T. Lin, M. Deng, H. Li. “T-GCN:A Temporal Graph Convolutional Network for Traffic Prediction,” in IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 9, pp. 3848-3858, Sept. 2020, doi: 10.1109/TITS.2019.2935152.